Image Smoothing¶
Goal¶
- 다양한 Filter를 이용하여 Blur 이미지를 만들 수 있다.
- 사용자 정의 Filter를 적용할 수 있다.
Image Filtering¶
이미지도 음성 신호처럼 주파수로 표현할 수 있습니다. 일반적으로 고주파는 밝기의 변화가 많은 곳, 즉 경계선 영역에서 나타나며, 일반적인 배경은 저주파로 나타납니다. 이것을 바탕으로 고주파를 제거하면 Blur처리가 되며, 저주파를 제거하면 대상의 영역을 확인할 수 있습니다.
Low-pass filter(LPF)와 High-pass filter(HPF)를 이용하여, LPF를 적용하면 노이즈제거나 blur처리를 할 수 있으며, HPF를 적용하면 경계선을 찾을 수 있습니다.
OpenCV에서는 cv2.filter2D() 함수를 이용하여 이미지에 kernel(filter)를 적용하여 이미지를 Filtering할 수 있습니다.
kernel은 행렬을 의미하는데 kernel의 크기가 크면 이미지 전체가 blur처리가 많이 됩니다.
일반적으로 5X5행렬을 아래와 같이 생성하여 적용합니다.
Filter가 적용되는 방법은
- 이미지의 각 pixel에 kernel을 적용합니다.
- 위 kernel을 예로들면 각 pixel에 5X5윈도우를 올려 놓고, 그 영역안에 포함되는 값의 Sum을 한 후에 25로 나눕니다.
- 그 결과는 해당 윈도우 영역안의 평균값이 되고, 그 값을 해당 pixel에 적용하는 방식입니다.
아래 trackbar를 이용하여 kernel사이즈를 조정하면서 결과를 확인할 수 있는 예제입니다.
Sample Code
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 | #-*- coding:utf-8 -*-
import cv2
import numpy as np
def nothing(x):
pass
img = cv2.imread('images/lena.jpg')
cv2.namedWindow('image')
cv2.createTrackbar('K','image',1,20, nothing)
while(1):
if cv2.waitKey(1) & 0xFF == 27:
break
k = cv2.getTrackbarPos('K','image')
#(0,0)이면 에러가 발생함으로 1로 치환
if k == 0:
k = 1
# trackbar에 의해서 (1,1) ~ (20,20) kernel생성
kernel = np.ones((k,k),np.float32)/(k*2)
dst = cv2.filter2D(img,-1,kernel)
cv2.imshow('image',dst)
cv2.destroyAllWindows()
|
Result
5X5 Kernel적용 결과
Image Blurring¶
Image Blurring은 low-pass filter를 이미지에 적용하여 얻을 수 있습니다. 고주파영역을 제거함으로써 노이즈를 제거하거나 경계선을 흐리게 할 수 있습니다. OpenCV에는 4가지 형태의 blurring 방법을 제공하고 있습니다.
Averaging¶
Box형태의 kernel을 이미지에 적용한 후 평균값을 box의 중심점에 적용하는 형태입니다. cv2.blur() 또는 cv2.boxFilter() 함수로 적용할 수 있습니다.
예를 들어 3x3형태의 필터는 아래와 같습니다.
-
cv2.blur(src, ksize) → dst¶ Parameters: - src – Chennel수는 상관없으나, depth(Data Type)은 CV_8U, CV_16U, CV_16S, CV_32F or CV_64F.
- ksize – kernel 사이즈(ex; (3,3))
Note
OpenCV에서 이미지의 Data Type은 아래와 같이 표현이 됩니다.:
* CV_8U : 8-bit unsigned integer: uchar ( 0..255 )
* CV_8S : 8-bit signed integer: schar ( -128..127 )
* CV_16U : 16-bit unsigned integer: ushort ( 0..65535 )
* CV_16S : 16-bit signed integer: short ( -32768..32767 )
* CV_32S : 32-bit signed integer: int ( -2147483648..2147483647 )
* CV_32F : 32-bit floating-point number: float ( -FLT_MAX..FLT_MAX, INF, NAN )
* CV_64F : 64-bit floating-point number: double ( -DBL_MAX..DBL_MAX, INF, NAN )
일반적으로 Data Type과 채널수가 같이 표현이 되어 CV_8UC1 과 같이 표현이 됩니다.(8bit unsiged integer이면서 채널이 1개)
Gaussian Filtering¶
box filter는 동일한 값으로 구성된 kernel을 사용하지만, Gaussian Filter는 Gaussian함수를 이용한 Kernel을 적용합니다. 즉, kernel 행렬의 값을 Gaussian 함수를 통해서 수학적으로 생성하여 적용합니다. kernel의 사이즈는 양수이면서 홀수로 지정을 해야 합니다. 이미지의 Gaussian Noise (전체적으로 밀도가 동일한 노이즈, 백색노이즈)를 제거하는 데 가장 효과적입니다.
-
cv2.GaussianBlur(img, ksize, sigmaX)¶ Parameters: - img – Chennel수는 상관없으나, depth(Data Type)은 CV_8U, CV_16U, CV_16S, CV_32F or CV_64F.
- ksize – (width, height) 형태의 kernel size. width와 height는 서로 다를 수 있지만, 양수의 홀수로 지정해야 함.
- sigmaX – Gaussian kernel standard deviation in X direction.
Median Filtering¶
kernel window와 pixel의 값들을 정렬한 후에 중간값을 선택하여 적용합니다. salt-and-pepper noise 제거에 가장 효과적입니다. 예를 들면 아래와 같이 kernel window을 적용시킨 결과가 다음과 같다면
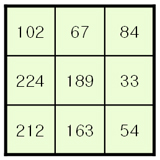
크기순으로 정렬을 하면 33,54,67,84,102,163,189,212,224입니다. 이중에 중간값인 102가 중앙값으로 결정이 됩니다.(중앙에 있는 189가 102로 변경됨.)
-
cv2.medianBlur(src, ksize)¶ Parameters: - src – 1,3,4 channel image. depth가 CV_8U, CV_16U, or CV_32F 이면 ksize는 3또는5, CV_8U이면 더 큰 ksize가능
- ksize – 1보다 큰 홀수
Bilateral Filtering¶
지금까지의 Blur처리는 경계선까지 Blur처리가 되어, 경계선이 흐려지게 됩니다. Bilateral Filtering(양방향 필터)은 경계선을 유지하면서 Gaussian Blur처리를 해주는 방법입니다.
Gaussian 필터를 적용하고, 또 하나의 Gaussian 필터를 주변 pixel까지 고려하여 적용하는 방식입니다.
-
cv2.bilateralFilter(src, d, sigmaColor, sigmaSpace)¶ Parameters: - src – 8-bit, 1 or 3 Channel image
- d – filtering시 고려할 주변 pixel 지름
- sigmaColor – Color를 고려할 공간. 숫자가 크면 멀리 있는 색도 고려함.
- sigmaSpace – 숫자가 크면 멀리 있는 pixel도 고려함.
아래 지금까지 설명한 Blur처리 방법을 적용한 예제입니다.
Sample Code
1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 32 | #-*-coding:utf-8 -*-
import cv2
import numpy as np
from matplotlib import pyplot as plt
img = cv2.imread('images/lena.jpg')
# pyplot를 사용하기 위해서 BGR을 RGB로 변환.
b,g,r = cv2.split(img)
img = cv2.merge([r,g,b])
# 일반 Blur
dst1 = cv2.blur(img,(7,7))
# GaussianBlur
dst2 = cv2.GaussianBlur(img,(5,5),0)
# Median Blur
dst3 = cv2.medianBlur(img,9)
# Bilateral Filtering
dst4 = cv2.bilateralFilter(img,9,75,75)
images = [img,dst1,dst2,dst3,dst4]
titles=['Original','Blur(7X7)','Gaussian Blur(5X5)','Median Blur','Bilateral']
for i in xrange(5):
plt.subplot(3,2,i+1),plt.imshow(images[i]),plt.title(titles[i])
plt.xticks([]),plt.yticks([])
plt.show()
|
Result
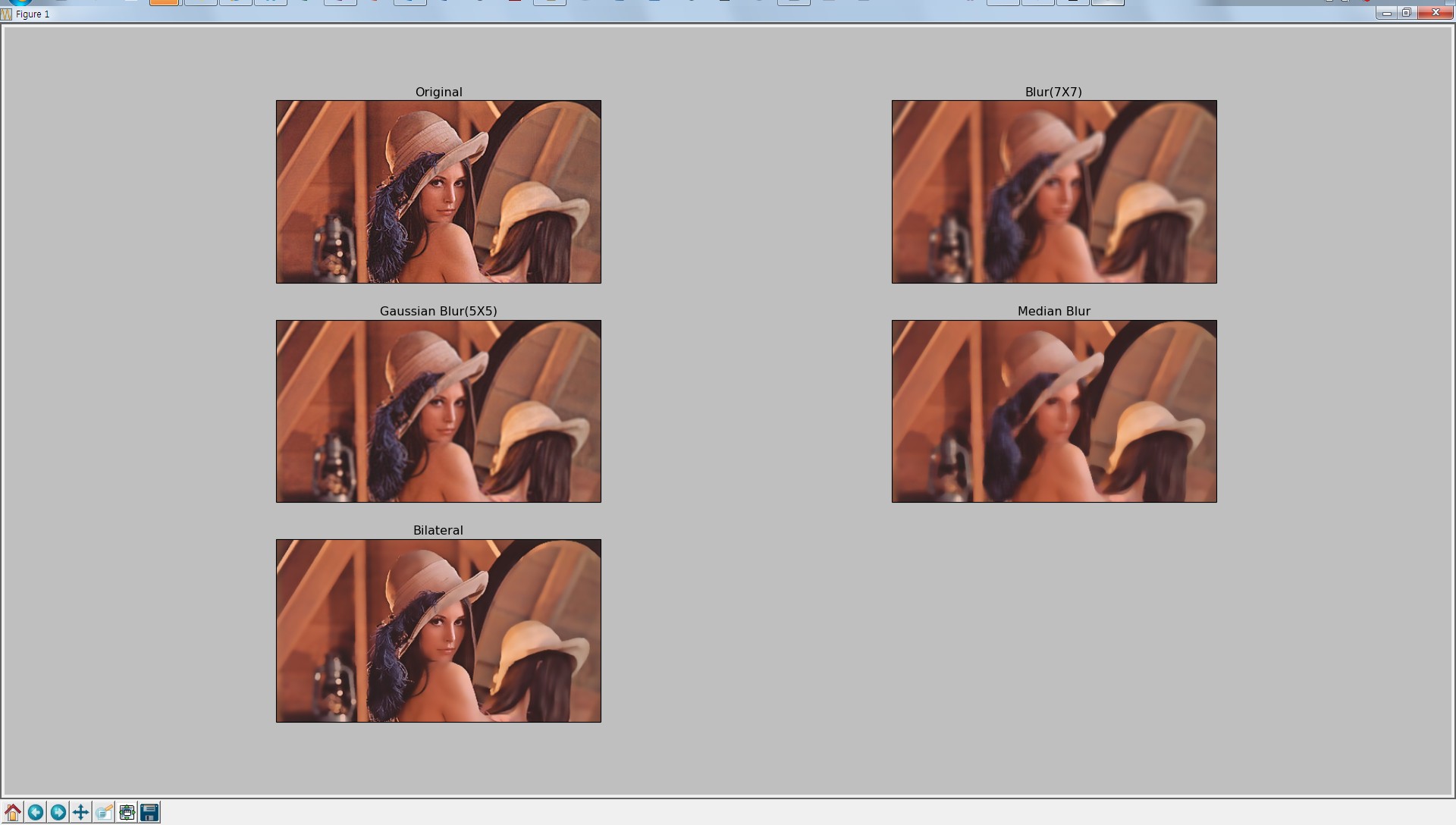
위 결과 이미지를 확대해서 보면 Gaussian과 Bilateral를 비교해보면 윤곽선에서 차이가 나타나는 것을 알 수 있습니다.